Main content:
1. The basic principle of asynchronous generator and its torque-speed characteristics
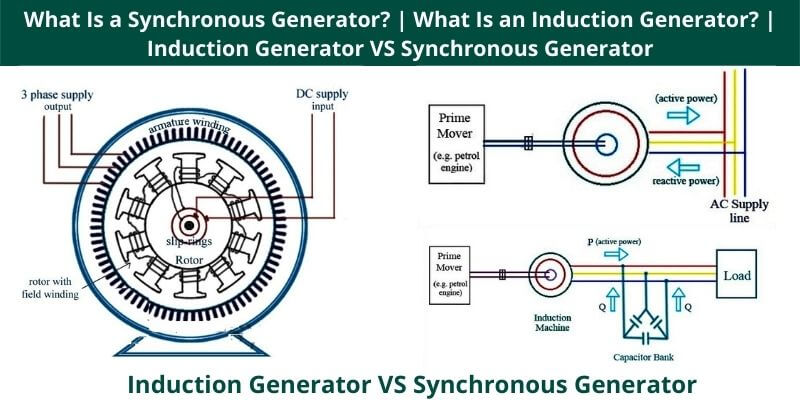
The stator of the asynchronous generator connected to the grid in the wind power generation system is basically the same as that of the synchronous generator, and the stator winding is three-phase, which can be connected in a delta or star connection. There are two types of rotors: squirrel cage type and wound type. According to the theory of asynchronous generator, the synchronous speed of the rotating magnetic field generated by the three-phase winding current of the stator when the asynchronous motor is connected to the grid is determined by the frequency of the grid and the number of pole pairs of the motor windings, namely

In the asynchronous generator formula: ns is the synchronous speed, f is the grid frequency, and p is the number of pairs of winding poles.
According to the theory of asynchronous generator, it is known that when the asynchronous generator is connected to the grid with constant frequency, the asynchronous generator can have different operating states: when the speed of the asynchronous generator is less than the synchronous speed of the asynchronous generator (that is, n<ns ), the asynchronous generator runs as a motor and is in an electric running state. At this time, the asynchronous generator draws electrical energy from the grid and outputs mechanical power from its rotating shaft; and when the asynchronous generator is driven by the prime mover, its speed exceeds the synchronous speed. (i.e. n>ns), the asynchronous generator will be in the power generation operation state, at this time the asynchronous generator absorbs the machinery supplied by the prime mover and outputs electrical energy to the grid. The different operating states of the asynchronous generator can be distinguished by the slip rate S of the asynchronous generator. The slip rate of the asynchronous generator is defined as

It can be seen from the above formula that when the asynchronous generator is connected in parallel with the power grid and operates as a generator, the slip rate S is a negative value.
According to the theory of asynchronous generator, the relationship between the electromagnetic torque M of the asynchronous generator and the slip rate S is shown in the following figure. According to the relationship between S and n indicated by the above formula, the M-S characteristic of the asynchronous generator is also the M-n characteristic of the asynchronous generator.
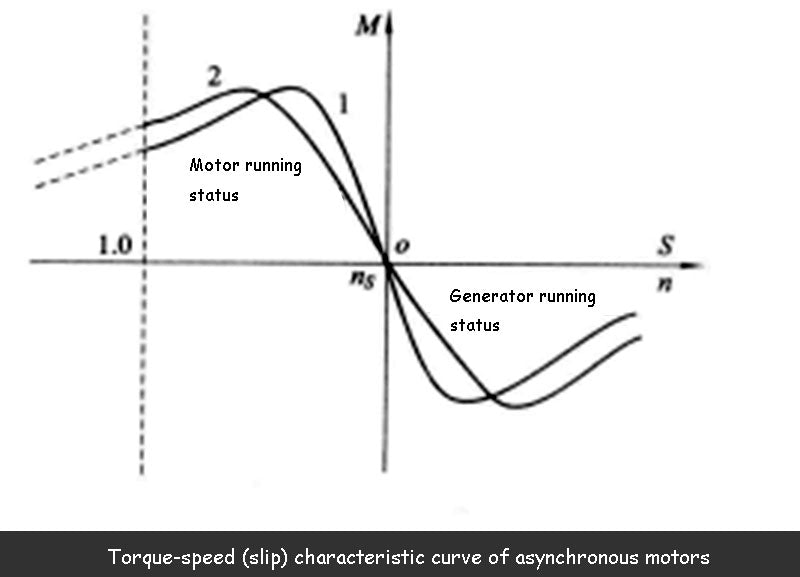
Changing the resistance in the rotor winding loop of the asynchronous generator can change the torque-speed characteristic curve of the asynchronous generator. Curve 2 in the above figure represents the torque-torque characteristic curve with a larger rotor winding resistance of the asynchronous generator.
In the wind power generation system in which the asynchronous generator is driven by the wind turbine and runs in parallel with the power grid, the absolute value of the slip rate S is taken as 2%~5%. The larger the value of |S|, the better the ability of the system to balance gust disturbance. , the speed of asynchronous generator with larger capacity that is generally operated in parallel with the power grid is between n s~1.05ns
2. Grid connection method of asynchronous generator
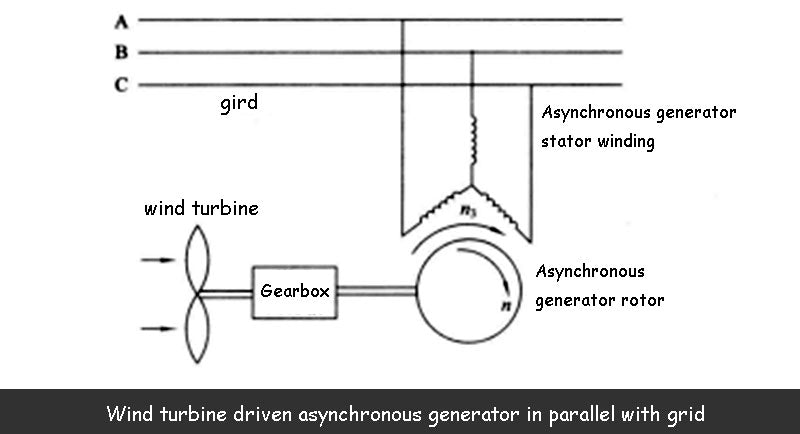
The schematic diagram of the parallel operation of the asynchronous generator driven by the wind turbine and the power grid is shown in the following figure. Because the wind turbine is a low-speed power machine, the speed between the wind turbine and the rotor of the asynchronous generator is increased through a speed-increasing gear drive to achieve a speed suitable for the operation of the asynchronous generator. Generally, the asynchronous generator running in parallel with the power grid can choose 4. Therefore, the speed of the asynchronous generator must exceed 1500 r/min or 1000 r/min to run in the power generation state and send electricity to the grid. The selection of the number of pole pairs of the motor is closely related to the speed-increasing gearbox. If the number of pole pairs of the asynchronous generator is selected to be small, the speed ratio of the speed-increasing gear transmission will increase, and the gearbox will be enlarged, but the size of the asynchronous generator will be smaller. On the contrary, if the number of pole pairs of the asynchronous generator is larger, the transmission speed ratio is reduced, the gearbox is relatively small, but the size of the asynchronous generator is larger.
According to the theory of asynchronous generator, when the asynchronous generator is connected to the power grid, the load is adjusted by the slip rate, and the output power and the rotational speed are almost linear. Strictly accurate, no need for synchronizing equipment and full-step operation, as long as the speed is close to the synchronous speed, it can be connected to the grid. Asynchronous generator is mostly used in wind turbines operating in parallel with domestic and foreign power grids, but a large inrush current (about 4-7 times the rated current of the asynchronous generator) will appear at the moment when the asynchronous generator is connected to the grid, and Make the grid voltage drop instantaneously. With the continuous increase of the single-unit capacity of the wind turbine, the impact of this inrush current on the safety of the components of the asynchronous generator and on the power grid has become more and more serious. Excessive inrush current may cause the asynchronous generator to connect to the power grid The automatic switch in the connected main circuit is disconnected, and a large drop in the grid voltage may cause the low-voltage protection to act, so that the asynchronous generator cannot be connected to the grid at all. There are the following methods for grid connection of asynchronous generator currently used in wind power generation systems.
2.1 Direct grid connection of asynchronous generator
This method of grid connection requires that the phase sequence of the asynchronous generator is the same as the phase sequence of the grid. When the speed of the wind driven asynchronous generator is close to the synchronous speed, it can be automatically connected to the grid; the signal of automatic grid connection is determined by the speed measuring device. given, and then complete the grid connection process by closing the automatic air switch. Obviously, this grid connection method is simpler than the quasi-synchronous grid connection of synchronous generators. However, as mentioned above, there will be a large inrush current and a drop in the grid when directly connected to the grid. Therefore, this grid connection method is only suitable for the case where the capacity of the asynchronous generator is less than 100 kilowatts and the capacity of the grid is relatively large. The first 55 kW wind turbines introduced in China and the 50 kW wind turbines developed by ourselves are all connected to the grid using this method.
2.2 The asynchronous generator is stepped down and connected to the grid
This method of grid connection is to connect a resistor, a reactor or an autotransformer in series between the asynchronous generator and the grid to reduce the magnitude of the inrush current and the voltage drop of the grid at the moment of grid-connection closing. Because components such as resistors and reactors consume power, after the asynchronous generator is integrated into the power grid, it must be quickly removed when it enters a stable operating state. This method of grid connection is less economical, and the 200 kW asynchronous wind turbine introduced in China adopts this grid connection method. When connecting to the grid, each phase winding of the asynchronous generator and the grid are connected in series with high-power resistors.
2.3 The asynchronous generator is connected to the grid through the sluice tube
This grid connection method is to connect a triac in series between the stator of the asynchronous generator and the grid through each phase. All three phases are controlled by thyristors. The two ends of the bidirectional thyristor are connected in parallel with the moving contact of the grid-connected automatic switch S2. The purpose of connecting the bidirectional thyristor is to control the inrush current at the moment of grid connection of the asynchronous generator within the allowable limit. The grid connection process is as follows: when the wind turbine receives the start command issued by the microprocessor in the control system, it first checks whether the phase sequence of the asynchronous generator is consistent with the phase sequence of the power grid. brake command, the wind turbine starts to start. When the speed of the asynchronous generator is close to the synchronous speed (about 99%~100% of the same protection speed), the control angle of the bidirectional thyristor is gradually opened synchronously from 180° to 0°; at the same time, the conduction angle of the triac At the same time, it gradually increases from 0° to 180°. At this time, the grid-connected automatic switch S2 does not act, the moving contact is not closed, and the asynchronous generator is smoothly integrated into the grid through the thyristor: as the speed of the asynchronous generator continues to increase, The slip rate of the asynchronous generator gradually tends to zero. When the slip rate is zero, the grid-connected automatic switch will act, the moving and closing contacts will be closed, the two-way thyristor will be short-circuited, and the output current of the asynchronous generator will no longer pass through. The two-way thyristor flows into the power grid through the closed automatic switch contact. After the asynchronous generator is connected to the grid, a compensation capacitor should be added to the generator end immediately to increase the power factor (cos φ) of the asynchronous generator to Above 0.95.
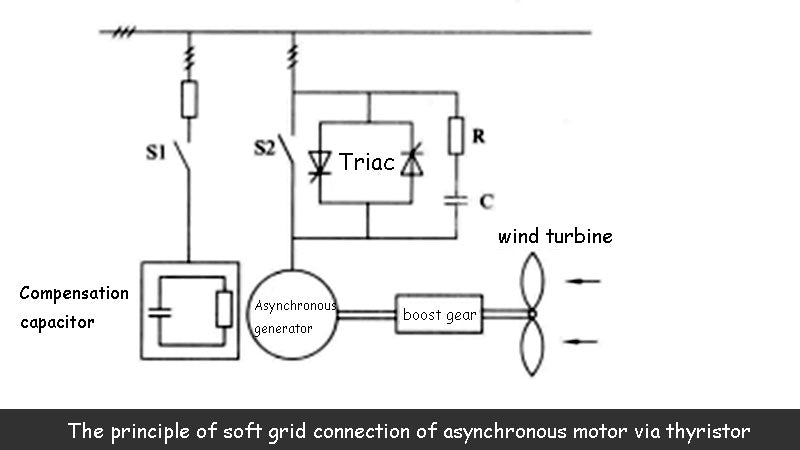
The characteristic of this soft grid connection method is that by controlling the conduction angle of the thyristor, the inrush current value at the moment when the asynchronous generator is connected to the grid is limited within the specified range (usually below 1.5 times the rated current), so as to obtain a smooth parallel connection. network transient process.
In the soft grid-connected line shown in the figure above, a bypass grid-connected automatic switch is connected in parallel at both ends of the two-way gate valve, and automatic switching is realized at zero slip rate. After the grid-connected transient process is completed, the two-way grid The thyristor is short-circuited. Another soft grid connection method corresponding to this soft grid connection method is to directly connect the asynchronous motor and the grid through a bidirectional thyristor, and there is no parallel connection at both ends of the thyristor. , the bidirectional thyristor not only plays the role of controlling the inrush current during the grid connection process, but also acts as a contactless automatic switch, which continues to exist in the main circuit after the grid connection. This soft grid connection method can save a grid connection. The automatic switching, and thus the higher switching frequency of the control loop, is its advantage. However, this connection method needs to use a high back-voltage triac with a large current allowable value. This is because in this connection mode, the current passing through the triac needs to meet the rated current value of the asynchronous generator, and it has a side-by-side value. The high back-voltage triac in the soft grid-connected connection mode of the road grid-connected automatic switch can meet the requirements as long as it can pass a current slightly higher than the no-load current of the asynchronous generator. This is the disadvantage of this connection method. The grid connection process of the soft grid connection mode is the same as the grid connection process of the above-mentioned soft grid connection mode with grid-connected automatic switch. When the two-way thyristor starts to conduct, the asynchronous generator operates as a motor, but with the asynchronous power generation When the speed of the machine increases, the slip rate gradually approaches zero. When the slip rate is zero, the triacs are all turned on, and the grid connection process ends.

Although the thyristor soft grid-connected technology is an advanced grid-connected method at present, it also puts forward strict requirements on the thyristor device and the related thyristor trigger, that is, the characteristics of the thyristor device should be consistent, stable and stable. The trigger circuit must be reliable. Only the characteristics of each phase of the triac in the main circuit of the asynchronous generator are consistent, the trigger voltage and trigger current of the control electrode are consistent, and the voltage drop after full turn-on is the same. The synchronization within the range of ° is gradually increased to ensure the balance of the three-phase current of the generator, otherwise it will be detrimental to the generator. At present, in the soft grid-connected thyristor method, according to the on-off condition of the thyristor, the trigger circuit has two modes: phase-shift triggering and zero-crossing triggering. (Cracked-angle sine wave) contains a lot of spectral wave components, which will pollute the power grid and must be limited and eliminated. The zero-crossing trigger is to gradually change the large conduction cycle number of the thyristor within the set period, and finally achieve full conduction, so that the asynchronous generator can be smoothly integrated into the power grid, so no harmonic interference is generated.
The integration of wind-driven asynchronous generator into the power grid through the soft grid connection of the thyristor is a commonly used grid-connection technology for medium and large-scale wind turbines at home and abroad. The 250 kW, 300 kW, 600 KM grid-connected asynchronous generator sets all use this grid-connected technology.
Read more: Independent operation of wind power system generators