Main content:
1. Two-speed asynchronous generator
Two-speed asynchronous generator is mostly used in wind power generation systems that operate in parallel with the electric power. Due to the randomness of wind energy, the wind speed often changes, and the wind turbines driving the two-speed asynchronous generator cannot often run at the rated wind speed, usually The time of driving the two-speed asynchronous generator wind turbine to operate at a lower than rated wind speed accounts for about 60% to 70% of the wind turbine's annual operating time. In order to make full use of wind energy at low wind speed and increase annual power generation, two-speed asynchronous generator has been widely used in recent years.
The two-speed asynchronous generator system refers to a motor with two different synchronous speeds. According to the aforementioned asynchronous motor theory, the synchronous speed of the two-speed asynchronous generator has the following relationship with the number of pole pairs of the stator winding of the asynchronous motor and the frequency of the parallel grid , right now

In the formula: ns is the synchronous speed of the two-speed asynchronous generator, r/min: p is the pole pair number of the stator winding of the two-speed asynchronous generator; f is the frequency of the power grid, and the frequency of the power grid in my country is 50 Hz.
Therefore, the synchronous speed of the grid-connected two-speed asynchronous generator is inversely proportional to the number of pole pairs of the motor. The synchronous speed is 1000 r/min. It can be seen that different synchronous speeds can be obtained as long as the number of pole pairs of the stator windings of the two-speed asynchronous generator is changed. How to change the number of pole pairs of the motor stator winding? There are three ways:
(1) Two asynchronous motors with different stator winding pole pairs are used, one with low synchronous speed and the other with high synchronous speed:
(2) Two sets of mutually independent windings with different pole pairs are placed on the stator of a two-speed asynchronous generator, that is, a double-winding two-speed motor;
(3) Only one set of windings is placed on the stator of a two-speed asynchronous generator, and different numbers of pole pairs are obtained by changing the connection mode of the windings, that is, the so-called single-winding two-speed motor.
The rotors of the two-speed asynchronous generator is all squirrel-cage rotors, because the squirrel-cage rotor can automatically adapt to the change of the number of pole pairs of the stator windings. The efficiency of the two-speed asynchronous generator at low speed is higher than that of the single-speed asynchronous generator. The loss is small, and the good effect of generating more power is obtained at low wind speed. The two-speed asynchronous generator driven by fixed-pitch stall blade wind turbines at home and abroad all use 4/6 pole-changing poles, that is, the synchronous speed is 1500/1000 r/min, corresponding to low power output at low speed and high power output at high speed.

2. Grid connection of two-speed asynchronous generator
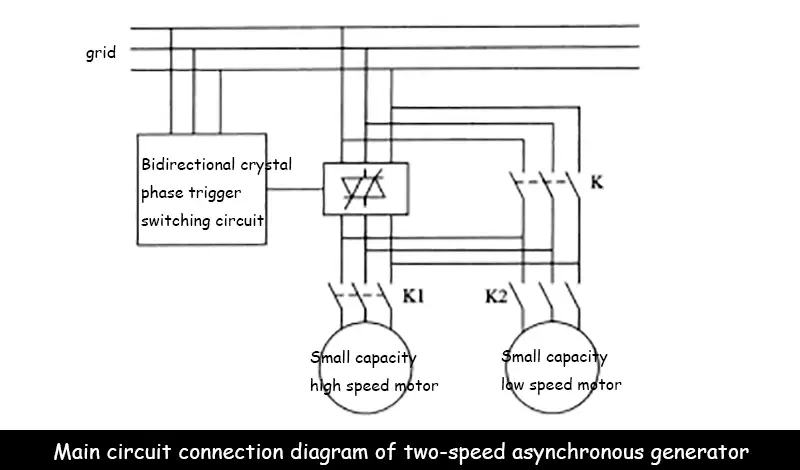
As mentioned above, when modern two-speed asynchronous generator is connected to the grid, the thyristor soft grid connection method is often used to limit the inrush current at the moment of grid connection. Limit the inrush current when starting the grid connection, and also limit the transient current during the mutual switching between the low-speed and high-speed windings. The two-speed asynchronous generator is softly cut into the main circuit of the grid through the thyristor. As shown in the figure below, the two-speed asynchronous generator starts and connects to the grid and the switching signal of high and low output power is controlled by the computer.
The grid connection process of the two-speed asynchronous generator is as follows:
(1) When the wind speed measured by the wind speed sensor reaches above the starting wind speed and maintains it continuously for 5-10 minutes, the control system computer sends a start signal, and the wind turbine starts to start. At this time, the two-speed asynchronous generator is switched to the small-capacity low-speed winding. , according to the predetermined starting current value, when the speed is close to the synchronous speed, the two-speed asynchronous generator is connected to the power grid through the thyristor, and the two-speed asynchronous generator enters the low-power generation state.
(2) If the 1-minute average wind speed measured by the wind speed sensor far exceeds the starting wind speed, such as 7.5 m/s, then after the wind turbine starts, the two-speed asynchronous generator is switched to the large-capacity high-speed winding. When the speed of the two-speed asynchronous generator is close to When the speed is synchronous, according to the predetermined starting current value, it is connected to the power grid through the thyristor, and the two-speed asynchronous generator directly enters the high-power generation state.
3. Operation control of two-speed asynchronous generator
The operating state of the two-speed asynchronous generator, i.e. high power output or low power output, is achieved by controlling the power.
(1) Switching from a small-capacity motor to a large-capacity motor, when the average output of the small-capacity generator reaches a certain set value within a certain period of time, it will automatically switch to the large-capacity motor through computer control. In order to complete this process, the generator is temporarily disconnected from the power grid, and the speed of the wind turbine is increased. According to the preset starting current value, when the speed is close to the synchronous speed, it is merged into the power grid through the thyristor. The set current value should be based on the wind power. Determined by the maximum current allowed by the on-site substation. Since the switch from a small-capacity motor to a large-capacity motor is a switch from low speed to high speed, this process is carried out in the state of the motor.
(2) Switching from a large-capacity motor to a small-capacity motor. When the two-speed asynchronous generator is running at high output power, if the average output power drops below 50% of the rated capacity of the small-capacity motor within a certain period of time, through the computer control system, the two-speed asynchronous generator will automatically be replaced by the large-capacity generator. When the motor is switched to a small-capacity motor, it must be noted that when the large-capacity motor is switched out and the small-capacity motor is switched in, although the speed of the wind turbine has gradually slowed down due to the reduction of the wind speed, the synchronous speed of the small-capacity motor is relatively large. The synchronous speed of the capacity motor is low, so the asynchronous generator will be in the state of super-synchronous speed. The current value limited by the small-capacity motor when cutting people should be smaller than the corresponding current value of the small-capacity motor at the maximum torque, otherwise the asynchronous generator will generate electricity. Opportunity to overspeed, resulting in overspeed protection action and can not cut people.
Read more: Two stand-alone operating wind power systems