
main content:
1. Motor Controller Basics
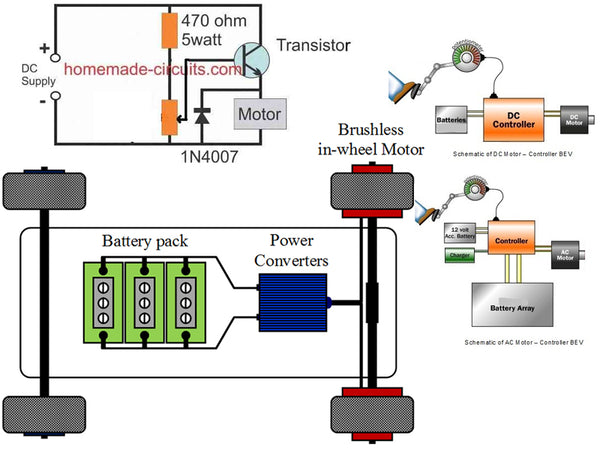
The motor controller, also called the motor driver, consists of a power electronic converter and a corresponding control unit. The power electronic converters used in electric vehicle motor drivers can be divided into DC/DC converters that drive DC motors and inverters (DC/AC converters, or Inverters) that drive AC motors. The commonly used switching device is IGBT, and MOS-FET can also be used in low-power drivers, and the general operating frequency can reach tens of kilohertz or even several megahertz. The energy can be transferred from the DC power supply to the motor input through the regular switching action of the switching device. The control unit generally takes a microcontroller or a digital signal processor (DSP) as the core, supplemented by the necessary detection circuits and interface circuits. Its function is to process various feedback information, such as command signals, feedback voltage, current, temperature, and speed. After certain operations and strategies, the gate switch control signal is generated. Since the action of the switch needs to consume power and the output of the control unit is generally only a level signal, the gate drive signal needs to be amplified by the gate drive circuit before it can drive the switching device to work. The block diagram of the motor driver functional module is shown in Figure 1.
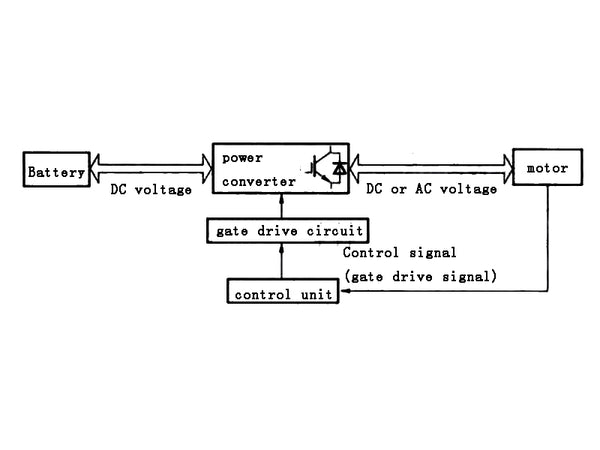
Figure 1 Motor driver functional module
Generally speaking, the power of the inverter is determined by the voltage and current capability of the semiconductor power device (IGBT or MOSFET) and the heat dissipation capability. The power of the motor is affected by the heat dissipation capability, and the inverter capacity also has limitations on the operation of the brushless motor. Taking the sine wave permanent magnet synchronous motor drive as an example, the maximum output power of the motor drive system depends on the power of the inverter, and the maximum torque output of the motor at low speed depends on the current capability of the inverter. The output voltage has reached the limit of the maximum value and the motor needs field weakening operation. As shown in Figure 2, when the electric motor is running stably,, the stator current vector can neither exceed the voltage limit ellipse nor the current limit circle. It must be within the voltage limit ellipse and the current limit circle, which intuitively describes the permanent magnet synchronous motor stability. The relationship between torque, speed, inverter operating conditions and parameters during state operation. In practical applications, the field weakening control of PMSM is mainly based on satisfying the voltage limit ellipse and current limit circle, adjusting id and iq to control the current vector trajectory to avoid saturation of the current regulator, so that the PMSM can be stably controlled by constant torque. , Quickly transition to weak field working mode.
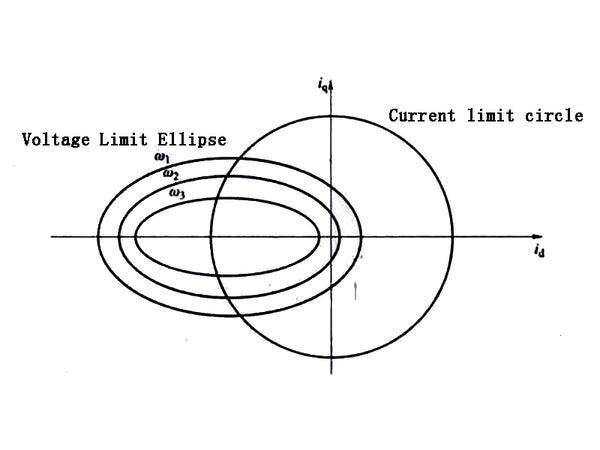
Figure 2 Voltage current limit loop
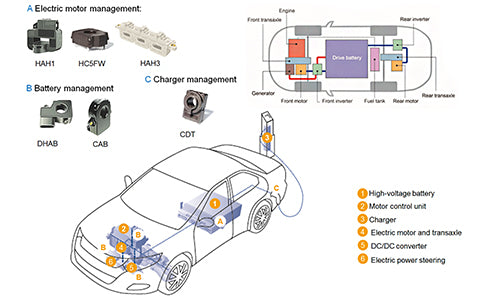
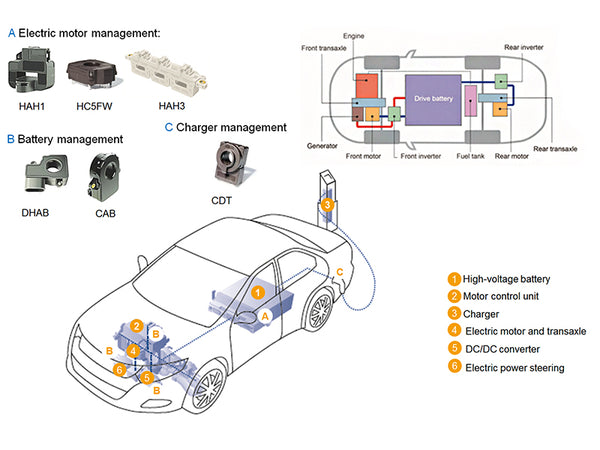
2. Requirements for electric vehicle motor drive system
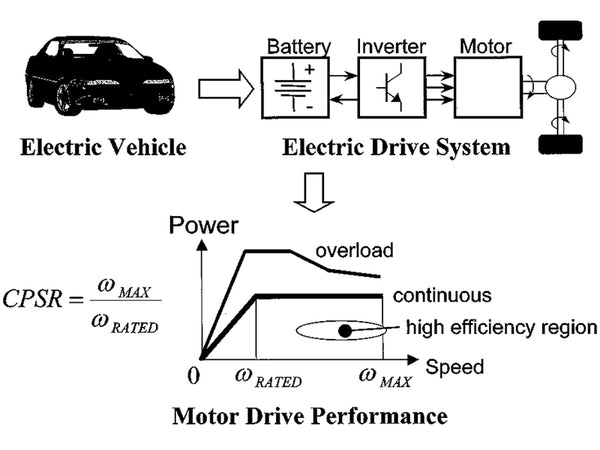
Different from the industrial application of motors, motors used in electric vehicles usually require frequent starting and stopping, fast dynamic response, low-speed constant-torque operation, strong overload capability, wide speed variation range, and four-quadrant operation. At the same time, it should also meet the comfort of driving and the ability to adapt to the environment. The comparison between electric vehicle motors and industrial motors is shown in Table 1. It can be seen that the working environment of electric vehicle motors is more complicated than that of industrial motors, and the requirements are also higher.
| Electric vehicle motor | industrial motor | |
| Package size | The layout space is limited, and special design is generally required according to specific products | Unrestricted space, available in standard packages for various applications |
| working environment | Wide range of ambient temperature changes and severe vibration | Moderate ambient temperature and low vibration |
| reliability | very high to ensure passenger safety | higher to ensure production efficiency |
| cooling method | Usually water-cooled (small size) | Usually air-cooled (large volume) |
| Control performance | Precise torque control, better dynamic performance | Most of them are frequency conversion speed control, and the dynamic performance is poor. |
| power density | higher | lower |
| efficient | Requires high efficiency in the work area | Only high efficiency at rated operating point is required |
| Cost-effective | extremely high | generally |
Table 1 Comparison of electric vehicle motors and industrial motors
Compared with the drives of industrial motors, the drivers used in electric vehicle motors are quite different in size, working environment, reliability, power density, cooling method, etc. The basic requirements for electric vehicle motor drive technology are summarized as follows.
① It has high torque density and high power density to meet the demanding space requirements of electric vehicles, while also reducing body mass.
②Wide speed regulation range to meet the needs of low-speed climbing and high-speed cruising at the same time.
③ It has high efficiency in a wide range of working speed and torque.
④ Wide and constant power operation capability can reduce the rated power requirements of the motor, thereby reducing the cost.
⑤ High reliability and stability in the vehicle operating environment should be ensured in any case with a high degree of safety, especially controllable in failure mode.
⑥ Low noise, including electromagnetic noise and audio noise, meet the needs of vehicle electromagnetic compatibility and driving comfort.
⑦ Reasonable cost, cost is always a big obstacle to the popularization of electric vehicles.
The indicators for evaluating a motor drive system mainly include external characteristics (the relationship between maximum output torque and speed), constant power speed regulation range, and drive system efficiency distribution map (not a certain point of efficiency, nor the efficiency of a separate motor body or controller) , drive system power density and torque density.













